Mako robotic-arm assisted THR
In the next few years, it is expected that most hip replacements will be assisted by robots. ORI continues to support this major advance in medical science by carrying out research and training surgeons.
This year, ORI is pioneering the research into robotic total hip replacement surgery by launching an observational study to evaluate the health outcomes from a Mako-Robotic-Arm assisted total hip replacement (the HELLO trial). Compared to other methods, the Mako robotic assisted hip replacement is the most accurate and consistent method for placement of the hip components. This allows the possibility of improving the outcomes and longevity of the hip replacement.
Professor Middleton explains further: “Understandably, some people have concerns over robots. We have all read about driverless cars in the newspapers losing control and crashing. Could this happen with the Mako robot? The answer is no.

Mako Robotic-Arm Assisted Technology
This is because the robot does not perform a part of the operation; it is still done entirely by the surgeon. Instead the robot assists the surgeon by confirming they are putting the hip replacement in exactly the right place and minimising the risk human error. This is called Active-Constraint. If the robot were to break down, the operation would not be affected, as the surgeon could place the implant in the standard way. In addition, the implants used are not new and untested. They have some of the best long term results of any hip and have the highest rating in the UK, 10A*.”
Stages of Robotic Hip Replacement
Stage 1: CT Scan
A CT scan is performed before the operation.

Stage 2: 3D modelling of the hip joint
The CT scan is used to generate a 3D model of the hip joint. This computer model is then used to plan the perfect position of the hip replacement. Once the plan is confirmed it is then loaded into the robot.

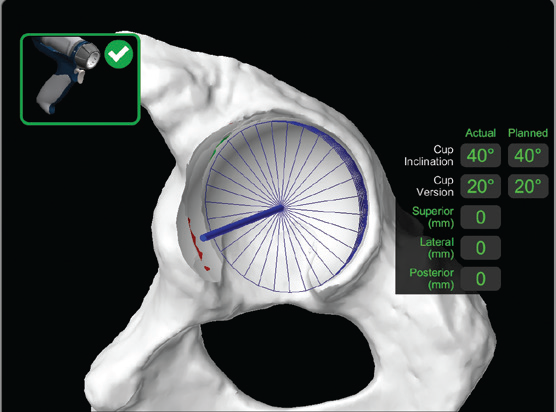
Stage 3: Planning of the hip replacement
The 3D model of the hip joint is used to plan the ideal position for the hip replacement.
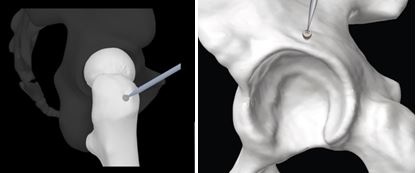
Stage 4: Navigation and matching of the patient’s hip to the 3D Model
At the start of the operation, when the patient is asleep, three small, 1cm, incisions are made on the top edge of the bony pelvis. The robot uses a system similar to that of the GPS satellite navigation in your mobile phone to work out where the body is. During the operation the surgeon uses a pointer instrument with tracker balls on to identify key landmarks on the hip joint to confirm the robot knows exactly where the hip is. This matches the 3D computer model exactly to the patient’s real hip.
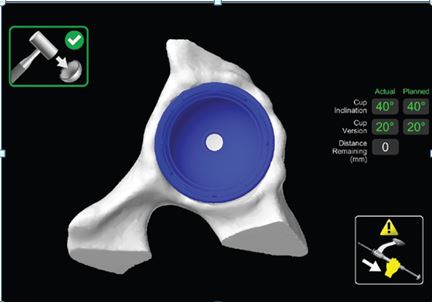
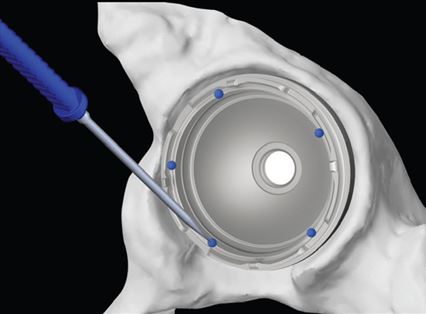
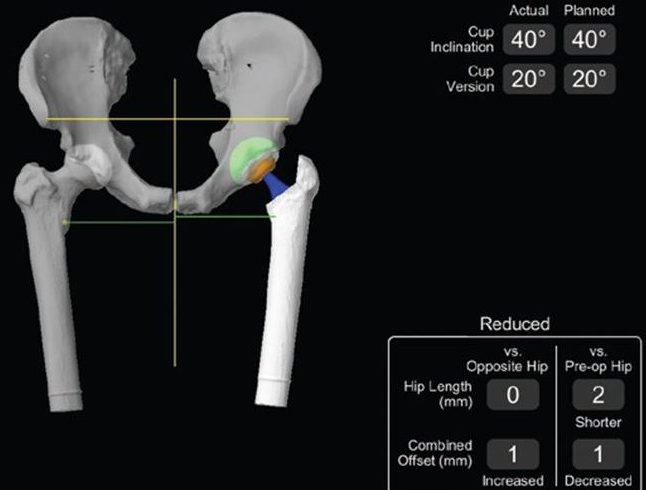
Stage 5: Inserting of the hip replacement
The surgeon then performs the hip operation using his normal surgical tools. The only difference is that the robot puts a steadying hand on the instrument. If the surgeon is putting the hip components in exactly as the preoperative plan suggests, then the robot does nothing. If the surgeon is 1mm out from the plan then the robot nudges him 1mm to the right position. If the surgeon is off plan, then the robot cuts the power off to the instruments so that the surgeon cannot proceed until he corrects his error. In this way the robot ensures that the surgeon delivers the precise positioning of the hip replacement.